这些年接触的扫地机、移动机器人项目,大家最常问的一个问题是:能不能不用激光雷达就建图?
LDS激光雷达模组最低也要 ¥50-70(国内白牌价),加上结构件、排线、防尘处理,整机成本增加 ¥80+。对于 2000 元以下的产品,这笔成本相当可观。
于是单点ToF方案开始进入视野——用一颗十几块钱甚至几块钱的芯片,能不能把建图这件事干到「够用」?
一、单点ToF传感器的价格
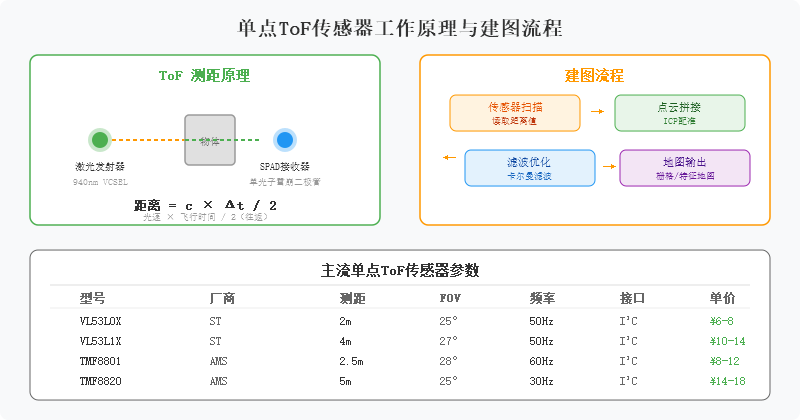
先看硬件成本。目前主流单点ToF传感器:
| 型号 | 厂商 | 最大测距 | 单价(仅供参考) |
|---|---|---|---|
| VL53L0X | ST | 2m | ¥6-8 |
| VL53L1X | ST | 4m | ¥10-14 |
| TMF8801 | AMS | 2.5m | ¥8-12 |
| TMF8820 | AMS | 5m | ¥14-18 |
单颗成本 ¥6-18 之间。加上驱动电路、FPC排线、简单的防尘罩,模组总成本控制在 ¥15-40。
对比 LDS 激光雷达的 ¥60-150,成本降低 50%-70%。如果裁掉旋转机构只用固定多角度阵列,甚至可以做到 ¥15/节点。
二、市场切入点:谁需要这类方案?
场景1:入门款扫地机(¥300-600)
目前这个价位的产品大部分还在用陀螺仪 + 碰撞条导航,惯性导航建图局限性很大。给一台千元内的扫地机装上单点ToF,如果实现激光雷达机型的类似同定位的功能,体验远胜纯惯性导航机器。
场景2:教育/玩具机器人
Makeblock、Loona 这类教育陪伴机器人,用户对建图精度没有期待,但”能识别位置”就是卖点。
三、性价比分析:单点ToF vs 主流方案
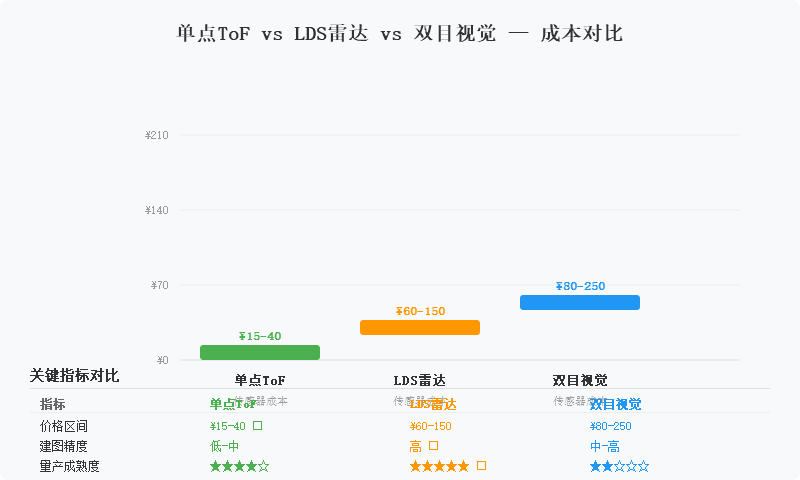
| 维度 | 单点ToF | LDS雷达 | 双目视觉 |
|---|---|---|---|
| 传感器成本 | ¥15-40 | ¥60-150 | ¥80-250 |
| 处理算力需求 | 低(DSP足够) | 中(ARM) | 高(NPU/GPU) |
| 建图精度 | 低-中 | 高 | 中-高 |
| 环境适应性 | 强 | 中等 | 弱 |
| 量产成熟度 | 高 | 很高 | 中 |
| 目标价位 | ¥300-600 | ¥1500+ | ¥3000+ |
关键结论:单点ToF填补的是 ¥600-1000 价位段的建图空白。
四、风险与局限
- 先天信息量不足:1颗传感器 = 1个距离点
- 角度分辨率粗:VL53L1X 典型FOV 27度
- 动态物体干扰:无法区分静止/动态障碍物
- 建图周期长:扫描式方案做不到 LDS 的实时性
五、总结:为什么值得做?
回到产品经理视角:不是要做最牛的方案,而是要在目标价位下给用户最好的体验。
扫地机 ¥600-1000 这个价格带,目前几乎找不到任何带成熟建图功能的产品。单点ToF方案以 ¥15-40 的成本,换来”能记路、能定位”的体验升级,消费者感知价值超过 ¥200+。
而且从长期看,4D 毫米波雷达逐渐成熟(2026年已有 ¥200 以内的方案),但那是 2027-2028 的事。现在到未来两年的窗口期,单点ToF建图是方案中性价比最高的选择。